A few years ago, when Xiaomi was making its Dafang WiFi camera, I bought two of them for a relatively low price. Since then, before every family vacation, I’ve set up one of them to spy on monitor our cat during the day before the cat sitter comes to take care of her in the evening.
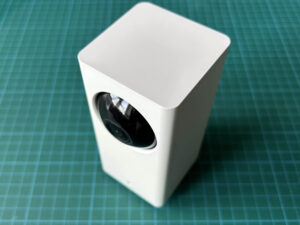
The Xiaomi Dagang wifi camera.
The main argument for this camera is, of course, the availability of a hacked firmware that disables any “cloud” access. This year I felt lucky and decided to upgrade to the open source u-boot bootloader first. I am still not sure what I did wrong, but I ended up with a bricked camera that no longer connected to my network. To fix this problem, “You will need to desolder your bootrom, reflash it and solder it back,” as the update instructions happily announce.
Continue reading →

 Greaseweazle is an open source project intended to be a universal floppy disk archiving tool. It consists of a USB connected floppy drive controller with custom firmware and accompanying host tools.
Greaseweazle is an open source project intended to be a universal floppy disk archiving tool. It consists of a USB connected floppy drive controller with custom firmware and accompanying host tools.



{kind=link}